← Back to Projects
Context-Aware Autonomous Navigation for Complex Urban Traffic
End-to-end mapless autonomous driving stack for unstructured urban landscapes.
Dean's Creative Achievements Award for the Final Year Project
Winner of the AUB Startup-Accelerator Program — Reframed the navigation stack as a data-capturing architecture for real-world simulation scenarios, securing accelerator funding.
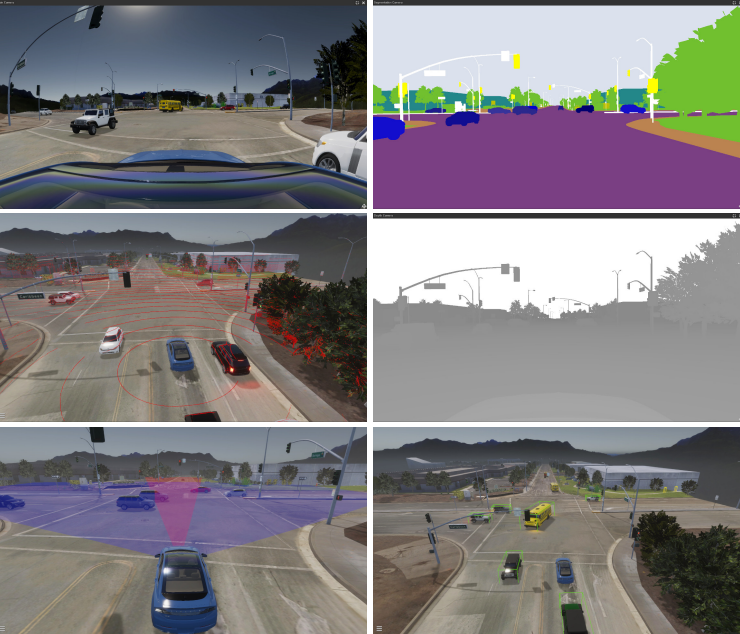
- Designed a context-aware autonomous navigation system integrating panoptic segmentation, POMDP-based probabilistic decision-making, and real-time path planning to safely navigate unstructured urban environments under ISO 26262 standards.
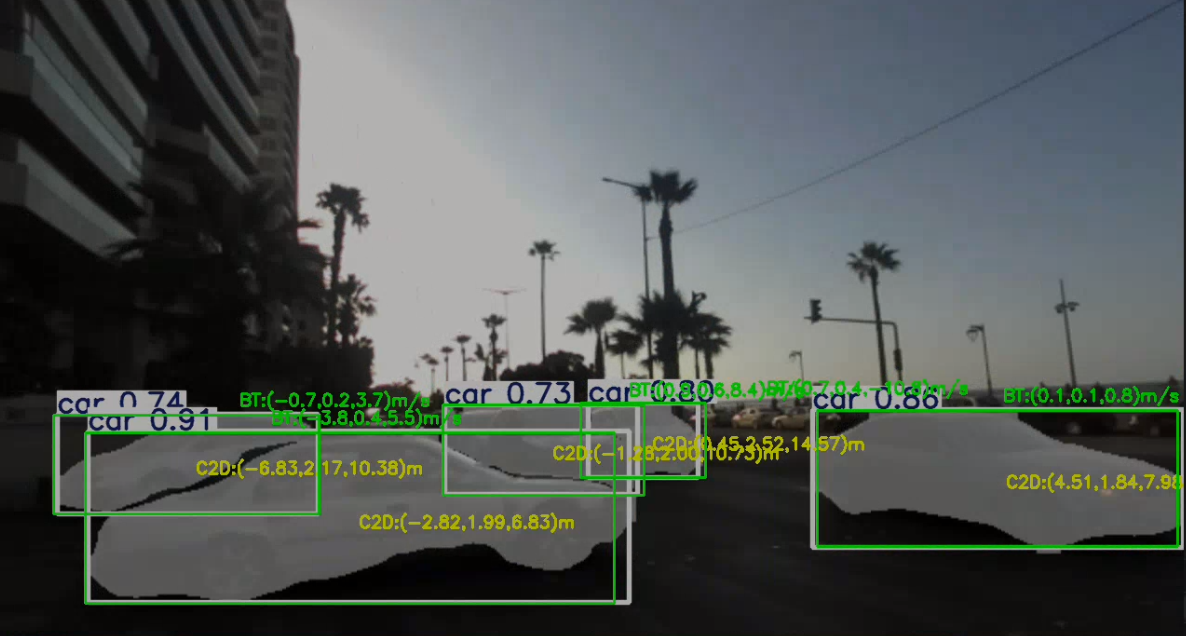
- Engineered a real-time perception system using a ZED stereo camera and YOLOP panoptic segmentation, achieving 95% object detection accuracy within 10 m and 20 cm localization precision in dynamic environments.
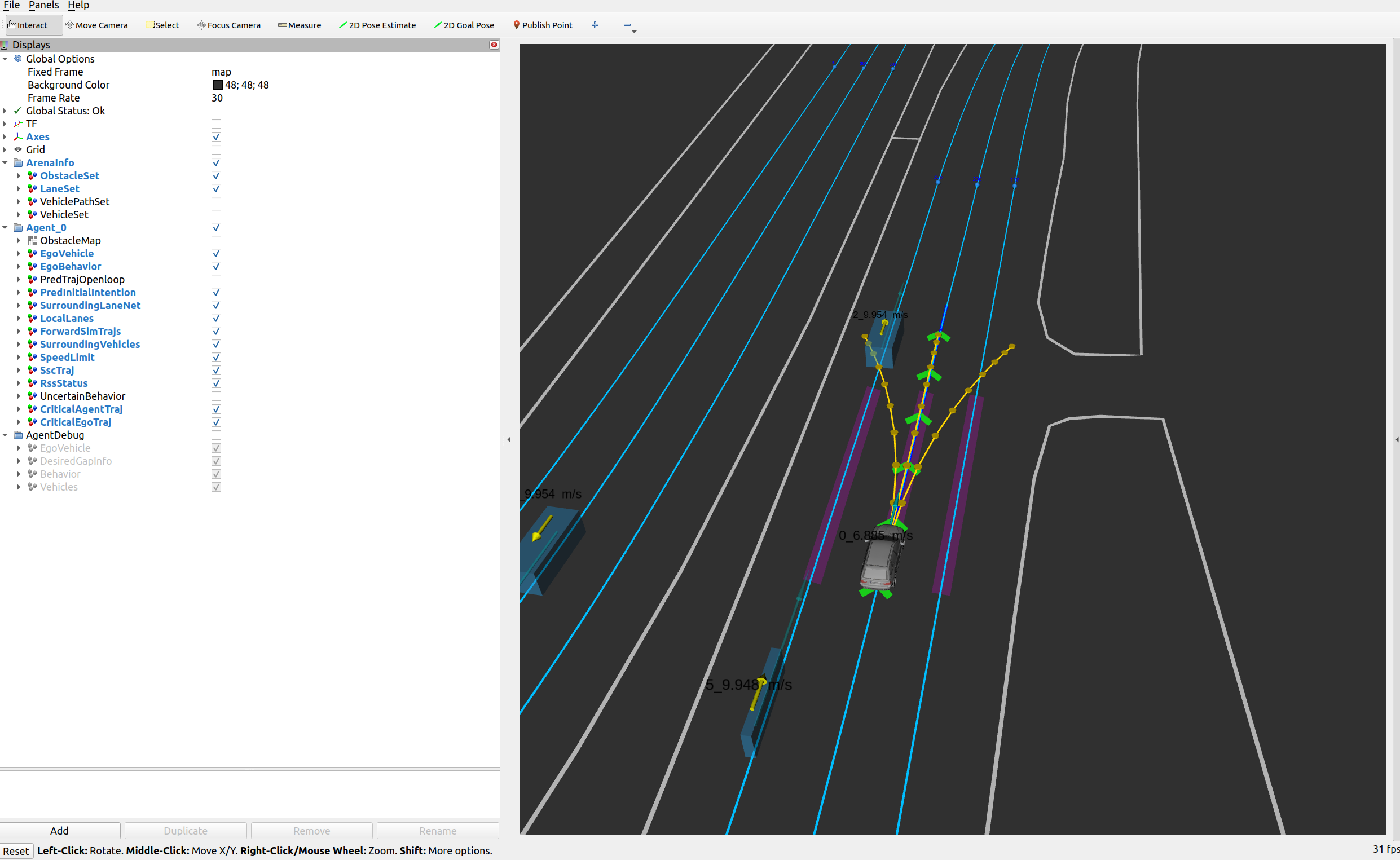
- Implemented a POMDP-based decision-making framework to handle partial observability and uncertainty in traffic interactions, reducing collision risks by 40% in simulations with erratic pedestrian and motorcycle behavior.
- Designed a Dynamic Window Approach (DWA) local planner for real-time obstacle avoidance, ensuring sub-200 ms reaction times and compliance with ISO 26262 and SAE J3016 automotive safety standards.