← Back to Projects
Ball & Beam Control System
PD and lead compensator design for a ball-and-beam setup modeled in Simulink and validated on an Arduino-based physical prototype.
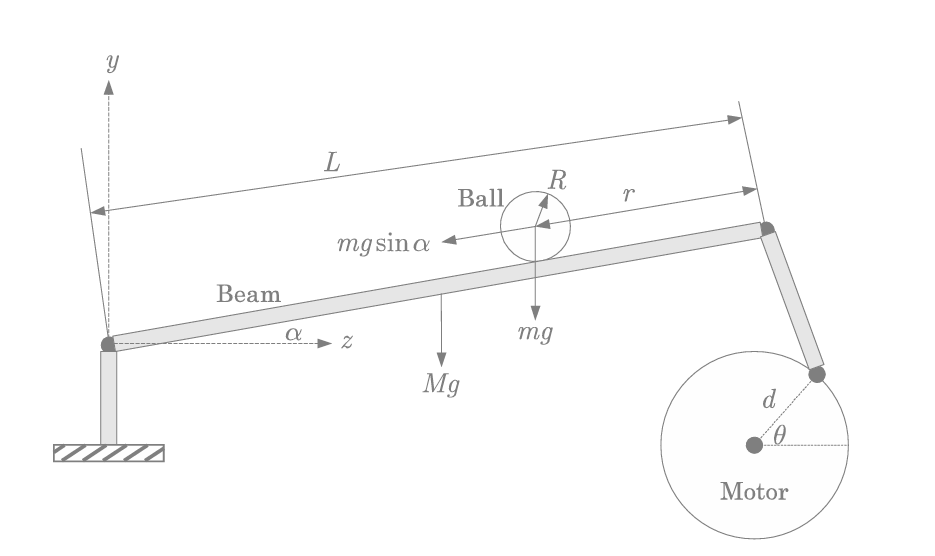
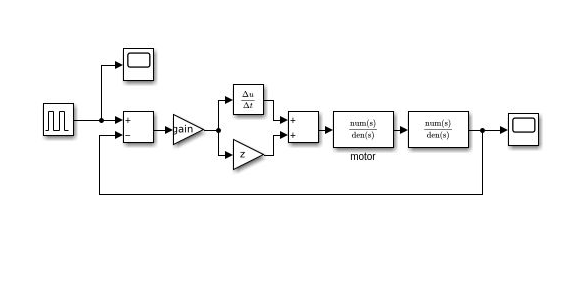
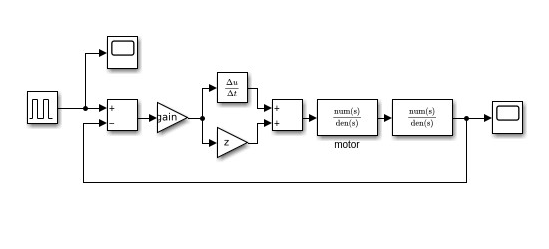
- Derived the ball-beam transfer function from Newtonian mechanics and characterized the servo motor's first-order dynamics by physically measuring its 180° transit time — modeled the complete plant in Simulink using parameterized mask values for gravitational acceleration, disc radius, and hinge distance.
- Designed a lead compensator and a PD controller using the angle of deficiency method on the root locus to meet 5% overshoot and 3s settling time specifications — achieved 2.7% overshoot with the lead controller and 1.125s settling time with the fine-tuned PD controller.
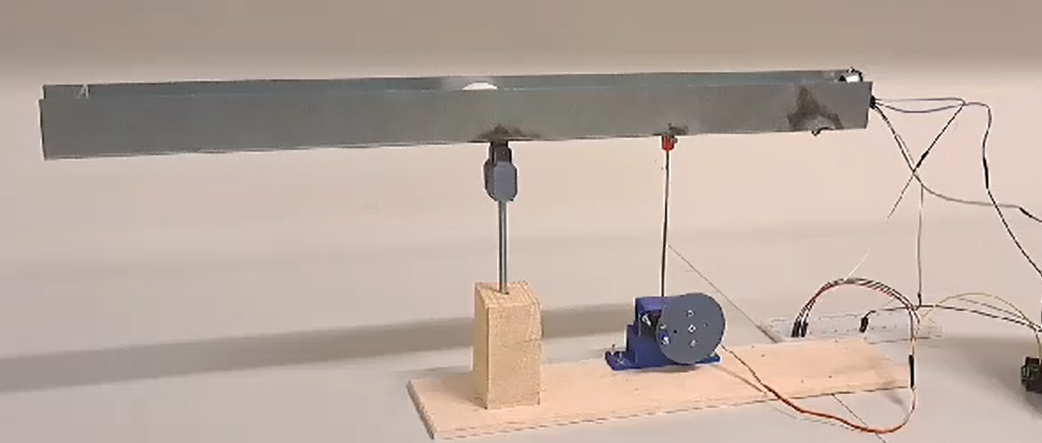
- Built a physical prototype using Arduino Uno, ultrasonic sensor, and servo motor, testing step, ramp, and impulse responses — after conditioning the ultrasonic sensor signal through an RC low-pass filter, the measured parabolic position profile closely matched Simulink predictions.