← Back to Projects
Autonomous Racing Vehicle Control at Performance Limits
Adaptive controllers and state estimation for autonomous race cars operating at handling limits.
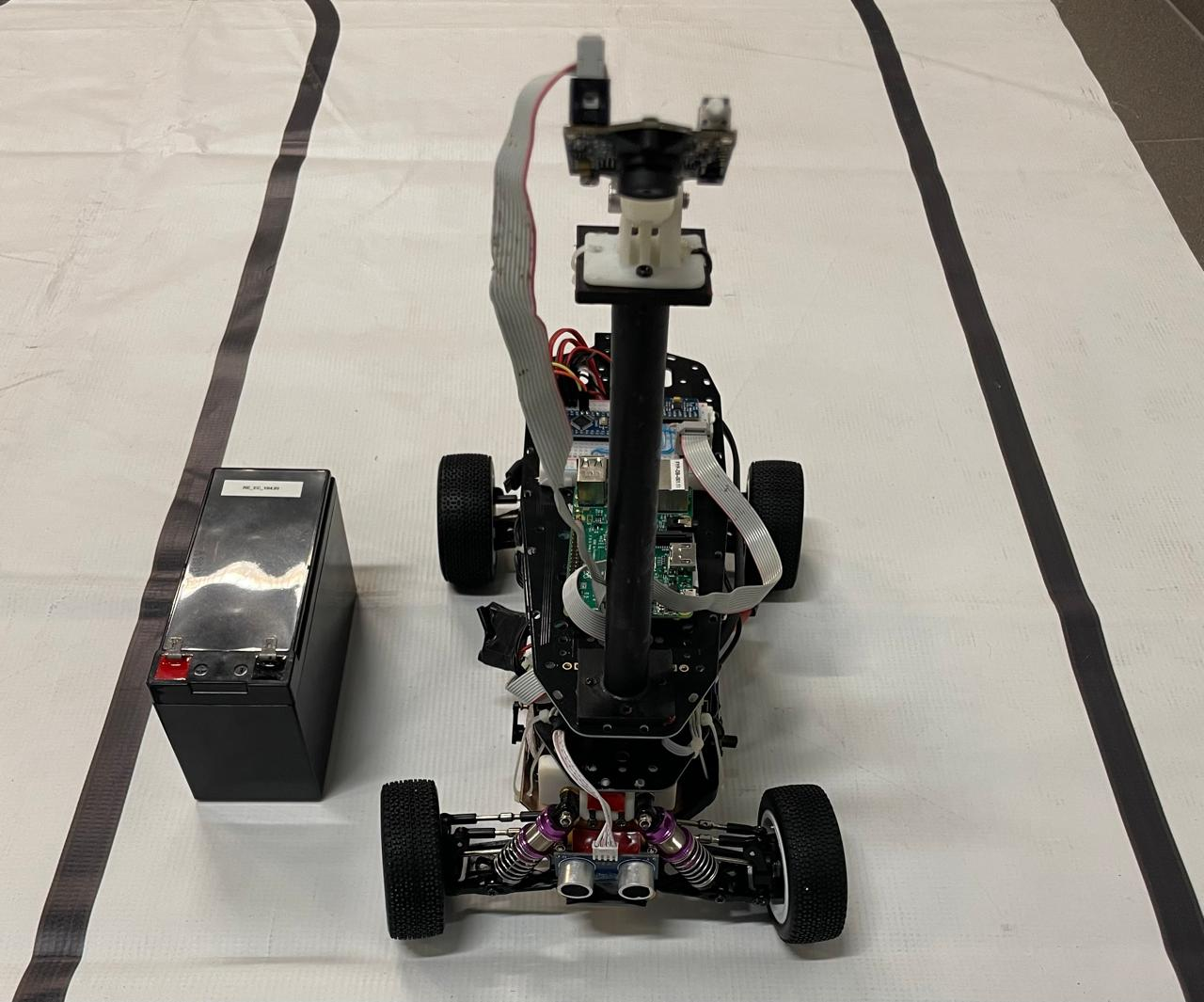
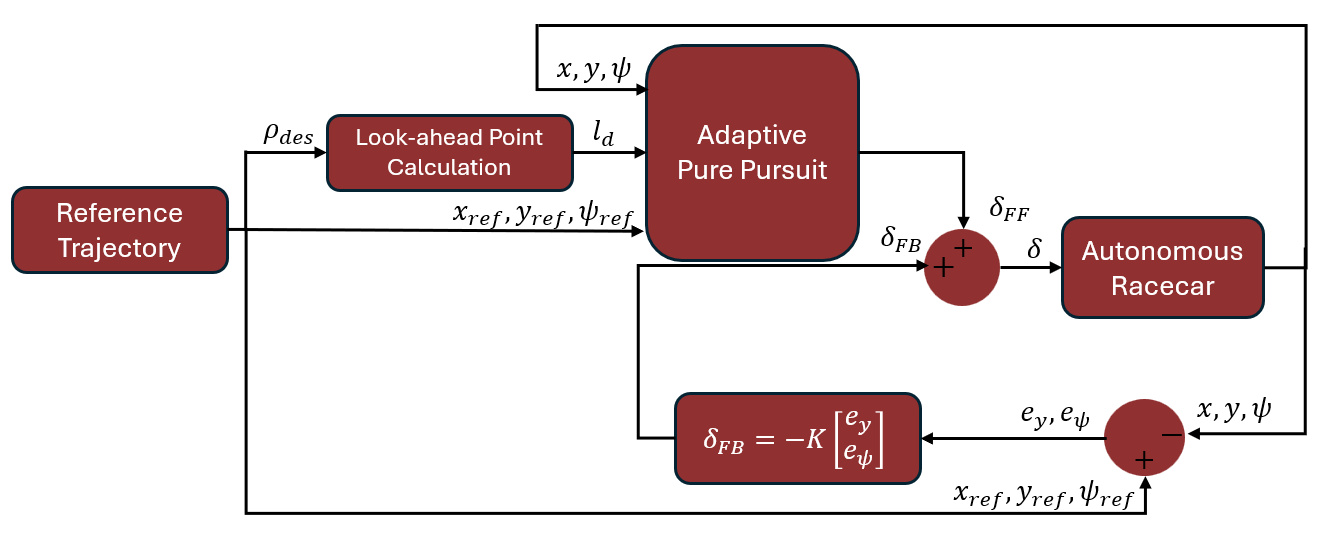
- Developed an adaptive pure pursuit (APP) controller with a feedback-regulated deviation model for small-scale autonomous race cars, achieving 85.69% improvement in lateral tracking, 19.75% better yaw stability, and 8% faster lap times compared to traditional methods.
- Developed a variable look-ahead distance algorithm based on path curvature to balance precision and stability during aggressive maneuvers, constrained by sensor limitations (0.25–1 m perception range).
- Implemented state-space modeling of lateral/longitudinal dynamics, full-state feedback control, and observer design (pole placement, LQG) in MATLAB/Simulink to compensate for tire slip and unmodeled nonlinearities.
- Designed and implemented a Linear Quadratic Gaussian (LQG) controller, integrating a Kalman filter for state estimation and an LQR controller for optimal path tracking under sensor noise and uncertainty.
- Developed pole-placement-based controller and observer meeting strict performance specifications (settling time <0.6 s, overshoot <5%, steady-state error <2 cm) and validated system controllability and observability.